OpenMVS学习记录
最近在学习三维重建框架OpenMVS
还没全学完
先马马虎虎整理一下
1 OpenMVS介绍与立体视觉基础
…
2 稠密重建
稠密重建是深度估计(depth estimate)是重建流程中第一个环节,也是三维重建中最关键的 环节。在传统算法中比较经典实用的两个算法是PlanSweeping和PatchMatch两种算法。在平面Sweeping 算法中用的比较多的是SGM算法。OpenMVS框架实现这两种算法,可以通过参数控制测试这两种算法的效 果对比。本章节主要介绍SGM和PatchMatch两种算法的具体实现。
OpenMVS中实现的SGM是通过对图像做校正,在视差层面下进行计算的(匹配关系由上面的三角测量转换),视差图可以与深度图相互转换。该算法也可不用对图像校正直接计算深度图(匹配关系由对极约束来转换),PatchMatch是直接计算深度图。
2.1 数据准备
OpenMVS输入是图像和对应的相机内参和外参,在数据准备阶段第一步是剔除无效的、未标定的、被废弃
的图像;第二步是给每个参考图像选择所有有用的邻域帧,这个邻域帧就是我们用来做匹配的帧,合适的选
择策略可以提升重建效果所以这步非常重要;最后就是基于马尔科夫随机场(MRF)优化,为每个参考图像
选择一个全局最佳的邻域视图。
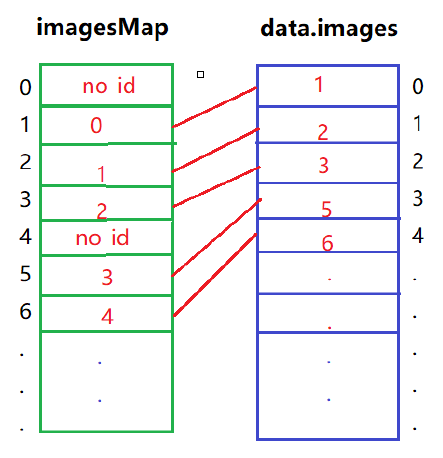
代码中图像映射关系:
3 曲面重建
..
4 Mesh Refinement
..
5 纹理贴图
..